マルチアノード光電子増倍管の位置測定精度の研究
城谷孝富、竹下徹 ( mail tohru@shinshu-u.ac.jp )
信州大学理学部物理科学科
1996/Feb
本稿では浜松ホトニクス社製のR2486というマルチアノード型の光電子増倍管を用いてその位置測定精度の研究を行った。
1. 光電子増倍管
通常型の光電子増倍管(図1)とマルチアノード型の光電子増倍管(図2)を示す。
通常型の光電子増倍管は、入射光子の光電効果により光電面から電子(これを光電子と呼ぶ)をたたきだす。この電子は、(第一段の)ダイノードへ電場により
加速されて衝突する。ここで加速された電子の衝突により2次電子が放出される。通常1個の電子に対して4個程度の2次電子が放出される。これらの2次電子
はさらに(第2段の)ダイノードへ向かう電位差のために加速を受ける。第2段ダイノードで再び2次電子放出を起こす。こうして複数段のダイノードにより電
子数が飛躍的に増大(増幅)し、アノードに到着する。こうして電気信号として出力される。全体として10^5-10^7倍の電子増幅率をもつものが普通で
ある。増幅中の各電子の飛跡は増幅の効率る向上のために図のようにぐにゃぐにゃした一様でないものとなる。また各ダイノードは電位差を作るような電圧分配
回路(光電子増倍管下図2)がついている。
一方マルチアノード型の光電子増倍管では、ダイノードがファインメッシュで作られおり、ファインメッシュ型光電子増倍管とも呼ばれる。この場合光電子は入
射した光子の位置から大きく外れることなくほぼ真っすぐに光電面からアノード面に増幅を続けながら進む。さらにアノード面を図に示すクロスワイヤーアノー
ドにして最終的にアノードに到着した電子の位置を2次元で読み出すことができる。
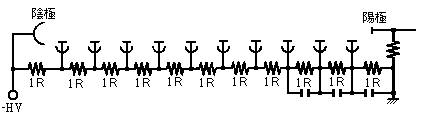
シグナルの読み出しシステムは図2右のようになっており、平行に張られたワイヤーの一端を適当な抵抗で鎖状に結びつけ、その両端から二つの出力を出す。
ダイノードで加速されてきた電子がワイヤーに入ると電流になる。鎖状抵抗のところで分流される電流の大きさは、並列回路のように回路のそれぞれの方向が
出力までに持つ抵抗の大きさの逆比をとる。すなわち、抵抗鎖がその長さに比例していれば、各出力からの電流パルスの時間積分値をX1、X2とおくとき、
X1と(X1とX2の和)の比を求めることにより、XG=X1/(X1+X2)
によりX1が出る端子をゼロとし抵抗鎖の両端を1にするような座標系XGをつくることがでる。
このようなアノードをもう一つ、ワイヤーが互いに垂直になるように、配置すると二次元の位置情報が得られる。つまりY1,Y2とおくと
YG=Y1/(Y1+Y2)
によりもう一方の座標を決定できる。この座標は多数の電子を含む信号の時間積分をとった電荷で比をとったものであり、電子群の重心位置に相当する。
2. R2486マルチアノード型光電子増倍管の位置測定精度の測定実験
実験装置の概念図を図4に示す。全ての装置は真っ暗な部屋の中に置かれている。
光源は日亜化学社の青色LED(410nmピーク:光 電子増倍管の量子効率の最大波長とほぼ等しい)を1mmfの光ファ
イバーで細くしたものを使う。光源は100nsの間入力電気信号を受けて光を生成する。光電子増倍管(PMT)は水平移動台に乗っており遠隔操作で
0.1mmより良い精度で位置が決められる。2次元の光電面をスキャンするために光源は上下方向に移動可能としてある。出力される4つの電気信号はそれぞ
れ独立なCAMAC-ADC (Analog
to Digital Converter)
チャンネルに入力され時間積分が行なわれる。この場合1ビンは0.25pCでありADCは12ビット(0-4095ビン)である。電気的接続の全体概念図
5を示す。
電子増倍管の量子効率の最大波長とほぼ等しい)を1mmfの光ファ
イバーで細くしたものを使う。光源は100nsの間入力電気信号を受けて光を生成する。光電子増倍管(PMT)は水平移動台に乗っており遠隔操作で
0.1mmより良い精度で位置が決められる。2次元の光電面をスキャンするために光源は上下方向に移動可能としてある。出力される4つの電気信号はそれぞ
れ独立なCAMAC-ADC (Analog
to Digital Converter)
チャンネルに入力され時間積分が行なわれる。この場合1ビンは0.25pCでありADCは12ビット(0-4095ビン)である。電気的接続の全体概念図
5を示す。
測定は、光電子増倍管の光電面を2次元的情報を得るように4mm格子毎に行った。これはアノードワイヤー間隔3.75mm程度にするためである。なお光電
子増倍管R2486は2インチの直径であり、有効半径28mmである。次にR2486のメーカによる基本データを図2に示す。R2486はダイノードが全
部で12段の光電子増倍管であり、アノードは3.75mm間隔でX,Y方向にそれぞれ16本ずつの構成となっている。なお最大印可電圧(光電面とアノード
の間の電圧)は1300Vである。
測定結果:
各格子点で1000発のLEDの光パルスに対する光電子増倍管の4本の出力パルスの電荷を300nsにわたり時間積分した電荷から重心位置を計算した。次
の図では重心位置をそれぞれXpsp,
Ypspと表した。LEDの位置は正確に4mm毎の格子点上にあるが計算されたXpsp, Ypspは必ずしも格子点上にはないことが解る(図6)。 特にそのずれは光電子増倍管の周辺(外側)で大きいことがわかる。これを極座標(光電子増倍管の中心からの距離とX軸からの角
度で表す)したときと、X軸,Y軸に射影した時のデータを示す。
特にそのずれは光電子増倍管の周辺(外側)で大きいことがわかる。これを極座標(光電子増倍管の中心からの距離とX軸からの角
度で表す)したときと、X軸,Y軸に射影した時のデータを示す。
極座標表示の中心からの距離Rの格子点LEDの位置)=Rledと測定された重心位置から計算された中心からの距離Rpspの関係はsinカーブでよき近
似されることが解った。その式は、
Rpsp = 0.71sin(0.044Rled) である(図7)。
またX,Y軸への射影による解析もsinカーブによるfittingがよい近似であることを示している(図7)。それらは、
Xpsp = -0.0134sin(0.690Xled+0.0430)+0.020
Ypsp = -0.0218sin(0.745Yled+0.0402)+0.0193 .
このようにR方向,X,Y方向ほぼ同じ関数で同じ程度の係数を示すことは光電子増倍管が十分円筒軸対称に作られていることを示す。
これを用いて逆変換を行うことにより光電子増倍管の出力信号から光の到着位置を推定することができる。次のページにその逆変換による光位置の推定の結果を
示す。逆変換が充分正しければ光位置は4mmおきの格子点上に並ぶはずである。ここで極座標表示の角度成分については一様であるという仮定を設けた。この
仮定が充分信頼に足るものであることは、上の図7のRpspでのfitting
の精度が充分にあることで確かめられている。
図12から明らかに解る様に光電子増倍管の円周に近い部分では格子点からはずれており、また一部(図の上部と右左部)で局所的に歪みが見える。この理由は
現在明らかではないが、アノード面が歪んでいるとも考えられる。これらの図で複数の点が存在する理由は、複数回の測定を行った際の光電子増倍管と光源の位
置の再現性が充分でなかったためである。
位置の測定精度は、各格子点での拡がり分布から求められる。その結果を、下図13に示す。ここでは極座標のR方向について分布を計算した。光電子増倍管の
中心から外(R大)に行くほど精度(dr)が大きくなることが見える。
この実験では充分な光量を与え、ファインメッシュ型の光電子増倍管で4出力型の信号の重心をとることにより光の位置測定精度が、下の図のように0.4mm
程度以下(光電子増倍管の中心付近)であることが解った。また周辺部では位置測定精度は悪化し約1mmとなることが解った。さらに光量が少ない場合のデー
タが必要と思われる。
また同様にX軸の位置測定精度もplotした(図14)。